Volvo XC90: Driver support / Using passing assistance
Passing assistance can be used with Adaptive Cruise Control* or Pilot Assist*. Several conditions must be met for passing assistance to be possible.
In order to activate passing assistance:
- your vehicle must be following a vehicle ahead (target vehicle)
- your vehicle's current speed must be at least 70 km/h (43 mph)
- the set speed must be high enough to safely pass another vehicle.
To start passing assistance:
- Turn on the left turn signal.
- Passing assistance will start.
WARNING
The driver should be aware that if conditions suddenly change when using Passing Assistance, the function may implement an undesired acceleration in certain conditions. Some situations should be avoided, e.g. if:
- the vehicle is approaching an exit in the same direction as passing would normally occur
- the vehicle ahead slows before your vehicle has had time to switch to the passing lane
- traffic in the passing lane slows down
Situations of this type can be avoided by temporarily putting Adaptive Cruise Control or Pilot Assist in standby mode.
* Option/accessory.
 Passing assistance
Passing assistance
(Option/accessory.)
Passing assistance can assist the driver when passing other vehicles. The
function can be used with Adaptive Cruise Control* or Pilot Assist*...
 Collision risk warning from driver support
Collision risk warning from driver support
The driver support systems Adaptive Cruise Control* and Pilot Assist* can
help alert the driver if the distance to the vehicle ahead suddenly decreases to
an unsafe distance...
Other information:
Volvo XC90 2015-2026 Owners Manual: Activating and deactivating the heated front seat
(Option/accessory) The seats can be heated for added comfort for the driver and passengers in cold weather. Seat heating can be set to automatically activate when the engine is started. When set to automatically activate, heating will be turned on at low ambient temperatures...
Volvo XC90 2015-2026 Owners Manual: Preparing for a long trip
It is important to have the vehicle's systems and equipment checked carefully before driving long distances. Check that the engine is running properly and that fuel consumption is normal there are no leaks (fuel, oil or other fluid) the brake pedal is functioning properly tire tread depth and air pressure are at correct levels...
- Manuals Home
- 2nd Generation XC90 Owners Manual
- 2nd Generation XC90 Service Manual
- Eco drive mode
- Video
- Using the windshield and head-light washers
- New on site
- Most important about car
Categories
Connecting equipment to the vehicle's data link connector
Incorrectly connected or installed software or diagnostic tools may have an adverse effect on the vehicle's electronics.
We strongly recommend that Volvo owners use only genuine, Volvo-approved accessories, and that accessory installations be performed only by a trained and qualified Volvo service technician. Certain accessories only work when the associated software is installed in the vehicle's computer system.
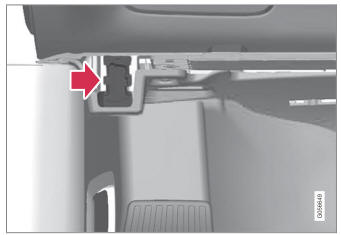
On-board Diagnostic (OBDII) socket under the dashboard on the driver's side.